

TalTech iseAuto — Open-Source Level-4 Autonomous Shuttle
iseAuto v2.0 is TalTech’s open, research-grade autonomous shuttle for last-mile mobility. Built on Autoware.universe (ROS) with a fully re-engineered low-level control stack, it combines a modular sensor suite (LiDAR, cameras, radar, GNSS/IMU) with scenario-based validation, digital twins, and campus/live pilots. The platform powers PhD research, industry collaboration, and EU projects across safety, V&V, cybersecurity, human–AV communication, and Mobility-as-a-Service.
The TalTech iseAuto initiative began in 2017 as one of the first autonomous vehicle projects in the Baltic region. Its goal was to design and build a self-driving shuttle from the ground up — integrating research, student education, and collaboration with local industry partners.
The first prototype, iseAuto v1.0, was launched in 2018. It was a small-scale electric shuttle developed in cooperation with Estonian companies such as Silberauto and ABB. The vehicle featured a custom drive-by-wire system, a basic autonomous navigation stack, and operated at low speeds in controlled environments such as the TalTech campus. The early platform served as a testbed for perception algorithms, motion control, and human–machine interaction.
First public autonomous driving at the Tallinn University of Technology 100th anniversary at 17. September 2018 – video



The full story of the Iseauto project
Building on the experiences from the first shuttle and several EU projects (SOHJOA, FABULOS, and FinEst Future Mobility), the team initiated iseAuto v2.0 in 2022. The new vehicle was designed to reach Level-4 autonomy with higher reliability, open-source software, and a modular architecture. It introduced Autoware.universe as the main driving stack, an upgraded low-level control system with safety controllers and redundant communication, and extensive use of simulation and digital twins for validation.
Today, TalTech iseAuto v2.0 operates as a fully functional research and education platform for developing, testing, and validating autonomous mobility technologies in both virtual and real environments. It continues to evolve within TalTech’s Smart City Living Lab and through international R&D collaborations.

Highlights
- Open research platform: full access to perception–planning–control and system decision points; ideal for reproducible experiments and education.
- Autoware.universe + ROS: state-of-the-art open-source autonomous driving stack integrated with TalTech’s middleware and tools.
- Upgraded low-level control: master and function controllers, safety layers, and redundant CAN/Ethernet communication for fail-operational behavior.
- Scenario-based V&V and digital twins: SiL/HiL, low- and high-fidelity simulation, and feedback loops to the real shuttle for safety and performance assurance.
- Living-lab pilots: campus and city pilots for last-mile services, cybersecurity trials, MaaS integration, and user acceptance studies.
System Architecture
Hardware & Control
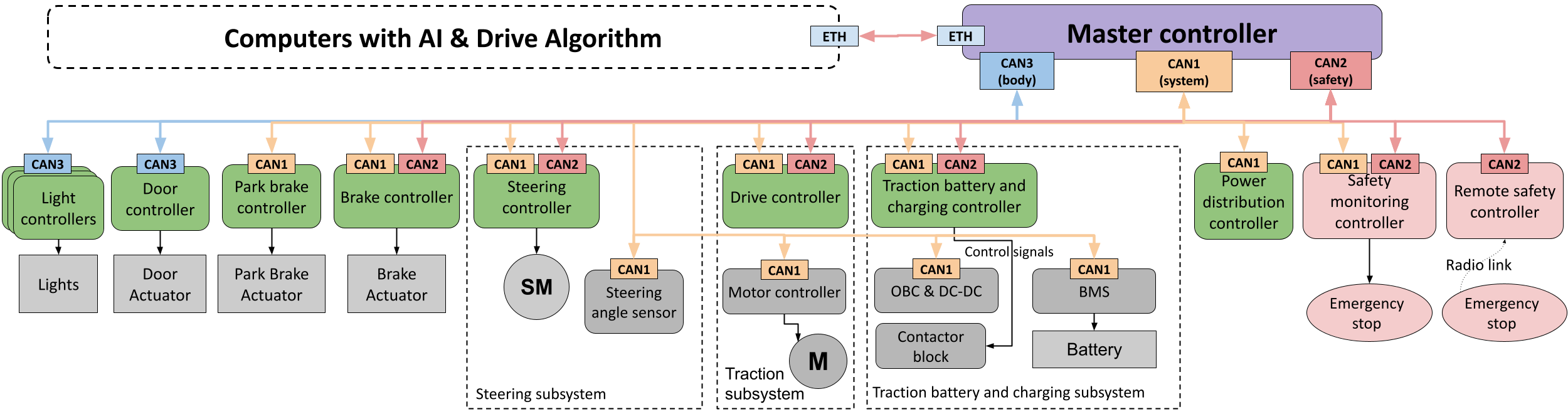
The shuttle is a low-speed L4 minibus (≈20 km/h for campus/industrial areas). Control is split into a master controller (system gateway/prioritization) and function controllers (critical and non-critical). Safety controllers ensure controlled stops on faults. Three CAN buses partition traffic (system, safety duplication, and body/low-priority), alongside Ethernet for high-bandwidth links.
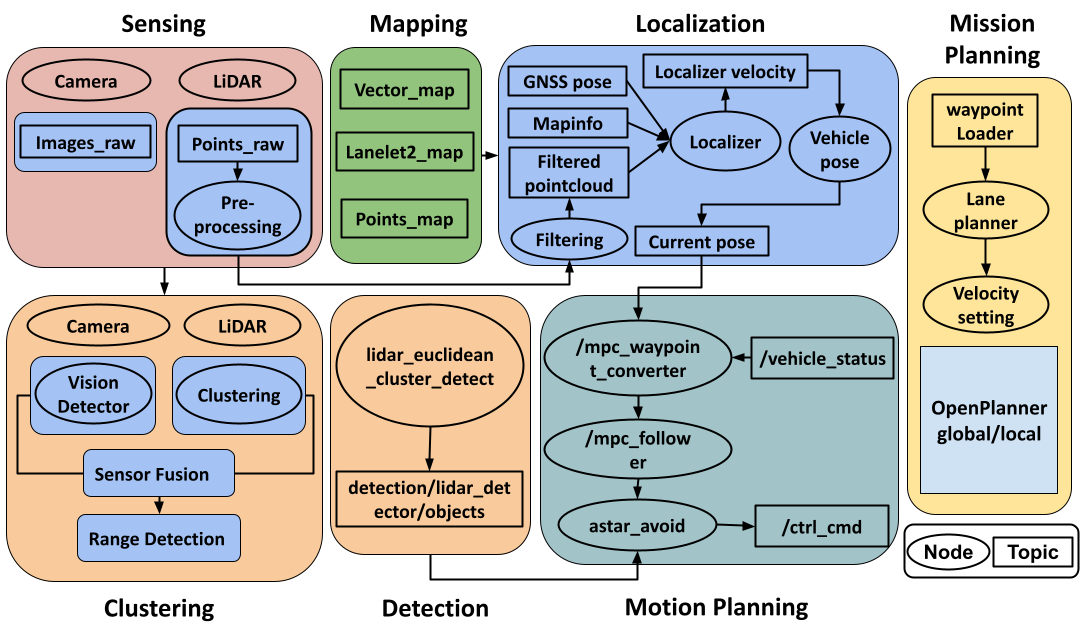
Autoware.universe Software Stack
High-level sensors connect to a primary compute unit. Autoware handles core AV functions (lane following, obstacle handling, traffic light and lane detection), while a custom bridge translates ROS control to UDP toward low-level controllers. The modular design eases integration of third-party drivers and research modules.
Validation & Digital Twin
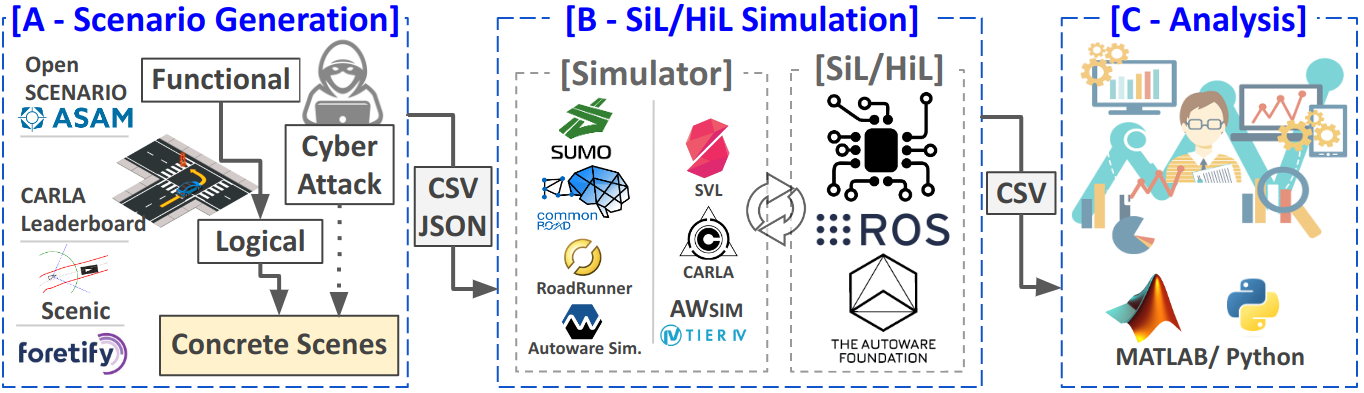
TalTech employs a three-stage validation toolkit: (A) scenario generation, (B) SiL/HiL simulation across low/high fidelity, and (C) results analysis. Digital twin feedback couples real-world data with virtual testbeds to accelerate coverage, improve reproducibility, and cut cost/time before public-road trials.
Selected Research Experiments
Advanced Overtaking
Urban overtaking was addressed via smooth two-phase sigmoid trajectories aligned with shuttle kinematics. High-fidelity simulation preceded vehicle trials to ensure safe, swift path generation and robust execution.
Language of Driving (LoD)
To improve human–AV interaction, the shuttle used LED symbols to communicate intent to pedestrians (e.g., “don’t cross” warnings, “safe to proceed” prompts). Studies evaluated comprehension and behavioral impact.

LED signaling symbols for communicating with pedestrians.
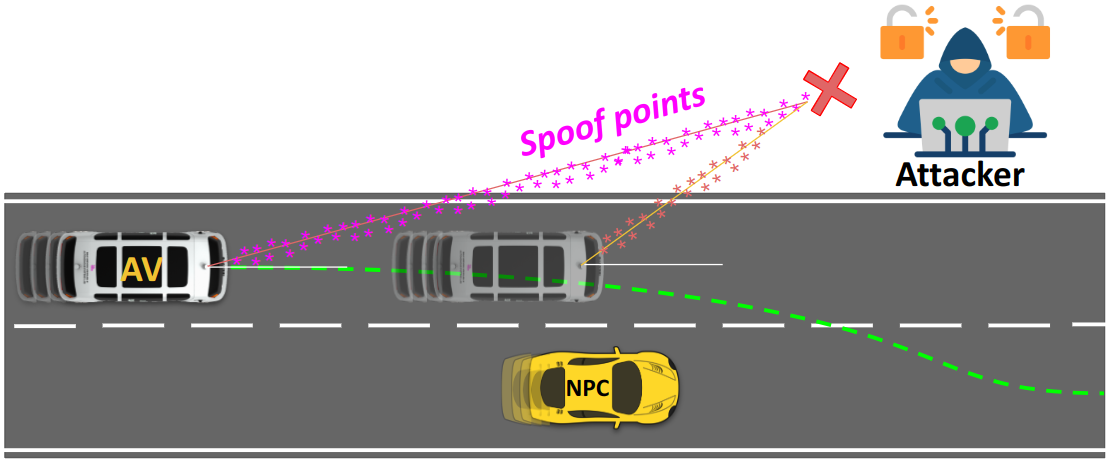
Combined Safety & Cybersecurity Testing
A joint methodology assessed cyberattack effects (e.g., LiDAR/position spoofing) on AV reliability versus safety baselines, using digital twins, SiL, and real-world tests — showing how attacks degrade otherwise-good algorithms.
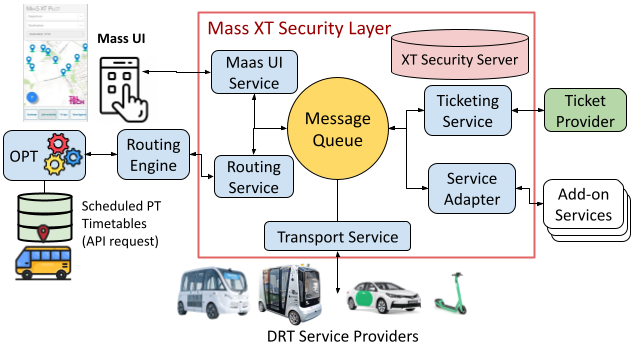
MaaS XT — Integrating Last-Mile AVs
A multi-provider Mobility-as-a-Service platform (MaaS XT) was prototyped with secure X-Road-style data exchange, linking UI, routing, demand-responsive transport, and ticketing. Pilots included AV last-mile services.
Pilots & Living-Lab Operations
iseAuto has run campus and city pilots since 2019 (e.g., Tallinn business park service near the airport), as well as multi-city and EU projects. These deployments provided user acceptance insights, weather and operations data, security experiments, and MaaS integration.

| Year | Pilot / Project | Focus |
|---|---|---|
| 2018 | SOHJOA Baltic | Weather challenge, UX, regulatory roadmap |
| 2020 | FABULOS | Fleet functionality, interoperability, security |
| 2021 | SOHJOA Last Mile | On-board safety operator removal |
| 2022 | CitySCAPE | Cybersecurity experiments |
| 2023 | FinEst Future Mobility | MaaS integration, user acceptance |
| 2025 | PLIADES | Data space integration, cyber testing |
Specs & Openness
- Sensors: 3D LiDARs, multi-camera, radar, GNSS/IMU.
- Software: Autoware.universe on ROS; TalTech ROS↔UDP control bridge; modular device drivers.
- Control: master + function controllers; safety controllers; multi-bus CAN + Ethernet; fail-operational design.
- Ops envelope: low-speed L4 (≈20 km/h) in campuses, business parks, and mixed urban test areas.
- Use: research, education, pilots; full access for partner labs under collaboration agreements.
Team & Collaboration
The project is led by TalTech’s Robotics & Autonomous Vehicles group with industry partners. We welcome joint research, PhD projects, and pilot deployments leveraging the open iseAuto v2.0 platform.