
TalTech iseAuto v2.0 — open Level-4 research shuttle
This page describes the second-generation iseAuto platform: Autoware.universe on ROS, the re-engineered low-level control and safety architecture, verification tooling, and current experiments. Shared programme history, timelines, and media entry points are on the iseAuto overview; the first-generation vehicle, specifications, and v1-era press archive are on iseAuto v1 (ISEAUTO).
iseAuto v2.0 is TalTech’s open, research-grade autonomous shuttle for last-mile mobility. It combines a modular sensor suite (LiDAR, cameras, radar, GNSS/IMU) with scenario-based validation, digital twins, and campus and city pilots. The platform supports PhD research, industry collaboration, and EU projects across safety, V&V, cybersecurity, human–AV communication, and Mobility-as-a-Service.

Highlights
- Open research platform: full access to perception–planning–control and system decision points; ideal for reproducible experiments and education.
- Autoware.universe + ROS: state-of-the-art open-source autonomous driving stack integrated with TalTech’s middleware and tools.
- Upgraded low-level control: master and function controllers, safety layers, and redundant CAN/Ethernet communication for fail-operational behavior.
- Scenario-based V&V and digital twins: SiL/HiL, low- and high-fidelity simulation, and feedback loops to the real shuttle for safety and performance assurance.
- Living-lab pilots: campus and city pilots for last-mile services, cybersecurity trials, MaaS integration, and user acceptance studies.
System Architecture
Hardware & Control
The shuttle is a low-speed L4 minibus (≈20 km/h for campus/industrial areas). Control is split into a master controller (system gateway/prioritization) and function controllers (critical and non-critical). Safety controllers ensure controlled stops on faults. Three CAN buses partition traffic (system, safety duplication, and body/low-priority), alongside Ethernet for high-bandwidth links.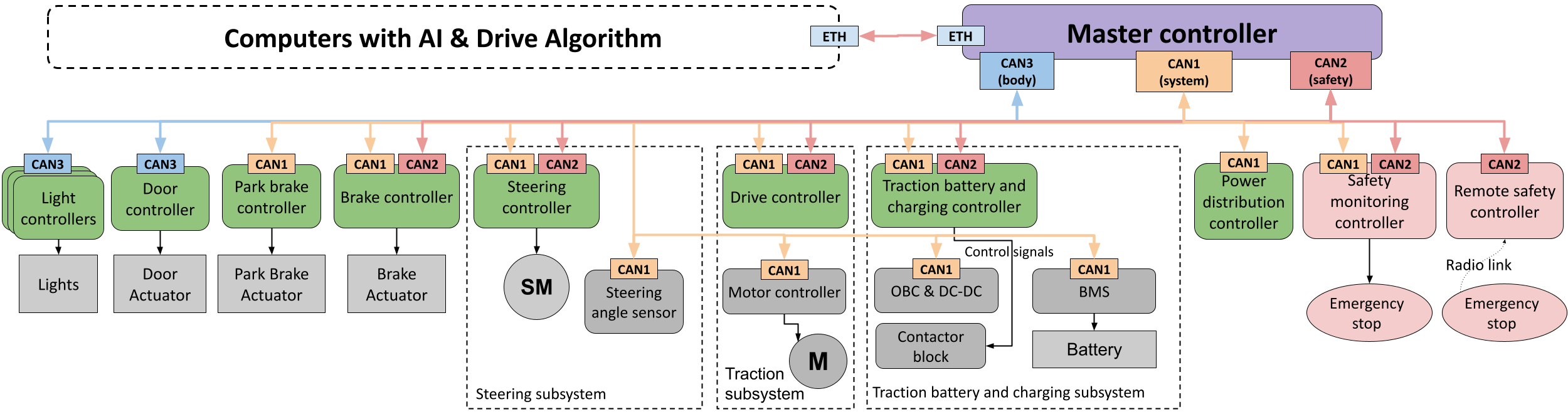
Autoware.universe Software Stack
High-level sensors connect to a primary compute unit. Autoware handles core AV functions (lane following, obstacle handling, traffic light and lane detection), while a custom bridge translates ROS control to UDP toward low-level controllers. The modular design eases integration of third-party drivers and research modules.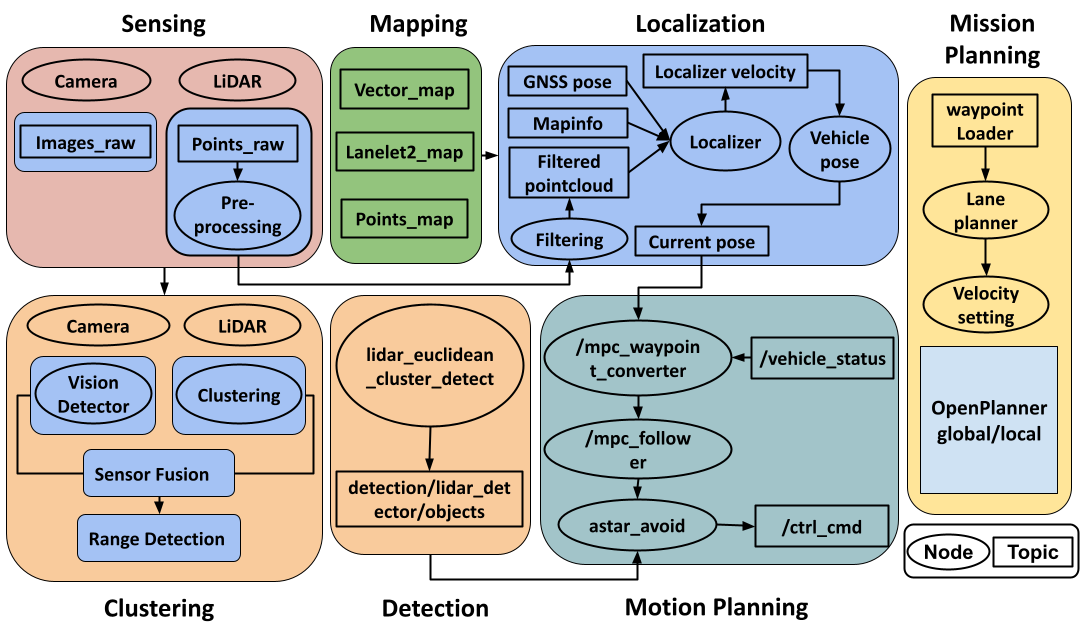
Programme-wide publications, validation, experiments, pilot history, specifications summary, and collaboration information are on the iseAuto overview (publications).