The iseAuto line at TalTech spans two vehicle generations: the original iseAuto v1 (ISEAUTO) shuttle (2017 onward, SilberAuto / ABB Eesti cooperation, ROS + Autoware.ai) and TalTech iseAuto v2.0 (from 2022, Autoware.universe, new electronics and safety-oriented low-level control). This page collects the shared story, registers, and links; each generation has its own project page for technical detail.
The programme started in 2017 as one of the first autonomous-shuttle efforts in the region. The first public autonomous run on campus took place during TalTech’s centenary in September 2018 (exact date and media below). A commercial path led to spin-off AuVe Tech; the university line stayed open for research and teaching. Building on v1 and EU pilots (e.g. SOHJOA, FABULOS, FinEst mobility), v2.0 was initiated for higher-assurance Level 4 operation, richer validation workflows, and an open stack aligned with current Autoware developments.
![]()

First public autonomous driving — TalTech 100 (2018)
17 September 2018 — official anniversary footage: YouTube — TalTech 100 / iseAuto.
 |  |
More v1-era photos and the prototype development team are on the iseAuto v1 (ISEAUTO) project page. The full story of the Iseauto project (video).
Timeline
- 2017 — Cooperation announced; v1 development starts.
- 2018 — First public autonomous demo (TalTech 100).
- 2019–2021 — Autonomous shuttle pilots in several EU and local projects.
- 2020 — Project fork: AuVe Tech founded for commercial shuttle manufacturing.
- 2022 — TalTech iseAuto v2.0 programme launched as an open research and experimental platform.
- 2023+ — FinEst Future Mobility / MaaS, CitySCAPE and related security work; ongoing living-lab operation.
Media and demos
- First public demo (17 Sep 2018): YouTube — TalTech 100 / iseAuto
- Project story (video): YouTube — story of the Iseauto project
- v2 hull / design coverage (2021): Arvutimaailm · Äripäeva tööstusuudised · Digigeenius · Logistikauudised
Publications
Research papers
- R. Sell et al., Open-source Level 4 Autonomous Shuttle for Last-mile Mobility. IEEE ETFA 2024. doi.org/10.1109/ETFA61755.2024.10710975
- Pikner, H., Sell, R., Malayjerdi, E. Level 4 commercial autonomous vehicle control system transition to an open-source solution. Proceedings of the Estonian Academy of Sciences 2024. doi.org/10.3176/proc.2024.2.05
- Pikner, H., Karjust, K. Case Studies of Implementing Embedded Control System Framework on Autonomous Vehicle. E3S Web of Conferences 631, 02009 (2025). doi.org/10.1051/e3sconf/202563102009
- Sell, R., Malayjerdi, M., Malayjerdi, E., Bellone, M., Pikner, H. Autonomous Vehicle for Industry 5.0: Digital Twin for System Safety Validation. Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), vol. 1, Porto, Portugal. SciTePress, 660−667. doi.org/10.5220/0013476600003941
- A. Roberts et al., Analysis of Autonomous Driving Software to Low-Level Sensor Cyber Attacks. 2025 IEEE/ACM 20th Symposium on Software Engineering for Adaptive and Self-Managing Systems (SEAMS), Ottawa, ON, Canada, 2025, pp. 122-132. doi.org/10.1109/SEAMS66627.2025.00021
- Razdan, Rahul; Sell, Raivo; Akbas, M. Ilhan; Menase, Mahesh (2025). Perspectives on Safety for Autonomous Vehicles. Electronics, 14 (22), art. 4500. DOI: 10.3390/electronics14224500
- Pikner, H.; Malayjerdi, M. (2021). Cyber-physical universal safety and crash detection system for autonomous robot. Robotic Systems and Applications. DOI: 10.21595/rsa.2021.22113
- Sell, R.; Soe, R.-M.; Wang, R.; Rassõlkin, A. (2021). Autonomous Vehicle Shuttle in Smart City Testbed. In: Zachäus C., Meyer G. (Ed.). Intelligent System Solutions for Auto Mobility and Beyond (143−157). Springer, Cham. (Lecture Notes in Mobility). DOI: 10.1007/978-3-030-65871-7_11.
- Bellone, M.; Ismailogullari, A.; Müür, J.; Nissin, O.; Sell, R.; Soe, R.-M. (2021). Autonomous driving in the real-world: The weather challenge in the Sohjoa Baltic project. In: Hamid, U. Z. A., Al-Turjman, F. (Ed.). Towards Connected and Autonomous Vehicle Highways (229−255). Switzerland: Springer International Publishing. (EAI/Springer Innovations in Communication and Computing). DOI: 10.1007/978-3-030-66042-0.
- Malayjerdi, M.; Baykara, B. C.; Sell, R.; Malayjerdi, E. (2021). Safety Assessment and Simulation of Autonomous Vehicle in Urban Environments. IOP Conference Series Materials Science and Engineering, 1140 (1), #012032. DOI: 10.1088/1757-899X/1140/1/012032.
- Kalda, K.; Sell, R.; Soe, R.-M. (2021). Self-driving Shuttle Bus Use Case in City of Tallinn. IOP Conference Series Materials Science and Engineering, 1140 (1), 012047. DOI: 10.1088/1757-899X/1140/1/012047.
- Wang, R.; Sell, R.; Rassõlkin, A.; Otto, T.; Malayjerdi, E. (2020). Intelligent Functions Development on Autonomous Electric Vehicle Platform. Journal of the Machine Engineering, 20 (2), 114−125. 10.36897/jme/117787.
- A. Rassõlkin, R. Sell, A. Kallaste, T. Vaimann, Propulsion Drive Topology Selection for Further Development of ISEAUTO Self-Driving Car, RTUCON2018
- A. Rassõlkin, R.Sell, M. Leier, Development case study of the first estonian self-driving car, iseauto, Electrical, Control and Communication Engineering, The Journal of Riga Technical University Vol14 Is. 1
- R. Sell, A. Rassõlkin, M. Leier, J. Ernits, Self-driving car ISEAUTO for research and education, June 2018, Conference: The 19th International Conference on Research and Education in Mechatronics, Delft, Holland
Master's theses
- Visual localization for Iseauto using structure from motion, Yaroslav Hrushchak
- Telemetry on robot operating system based self-driving vehicles, Osman Firat Akandere
- Iseauto uue alusraami väljatöötamine, Mari-Ly Klaats
- Dünaamiliselt uuendatav 3D kaardi lahendus Iseautole, Mirjam Feodorov
- Autonoomse sõiduki raja järgimine vabavaralise tarkvaraga Autoware, Priit Trink
- Evaluation of multiple lidar placement on a self-driving car in Autoware, Mihkel Väli
- Isejuhtiva auto tarkvara mudelipõhine integratsioonitestimine Autoware näitel, Lauri Roomere
- Estimating object detection reliability for TTU “Iseauto” self-driving car, Artur Vainola
- TTU self driving car master controller embeded software testing, Eslam El-Sherbieny
- Development of Test Bench for Propulsion Motor of Self-driving Car ISEAUTO, Durgun Ihsan Ata, 09.07.2020
- Firmware upgrade solution for TalTech self-driving car controllers, Lass Keijo, 15.01.2019
- Modelling and simulation of iseauto self-driving vehicle dynamics, Onyshchenko Hennadii, 03.06.2021
- Development of a cybersecurity evaluation test bed for autonomous self-driving vehicles, Roberts Andrew, 17.08.2020
- Rooli kontroller isesõitvale sõidukile "ISEAUTO". Steering Controller for Self-Driving Vehicle "ISEAUTO", Sosnovski Oleg, 01.06.2020
Bachelor's and diploma theses
- Madala taseme juhtkontrolleri arendus isejuhtivale sõidukile, Elvar Liiv
- Elektriauto mootori juhtsüsteemi signaalide analüüs ja otsejuhtimise võimaluste kaardistamine, Kirill Tihhonov
- Choosing distance sensors for TUT self-driving vehicle, Maarjo Mass (EST)
- Andmeedastuskihi loomine TTÜ isejuhtiva auto kasutajaliidese jaoks, Krista Norak
- Development and implementation of an optimal navigation system for a self-driving test car, Mohammad Tavassolian
Reports
- LMV Pilot report, Ruxin Wang
Chronological press clips remain on the iseAuto v1 (ISEAUTO) project page.
Validation & Digital Twin
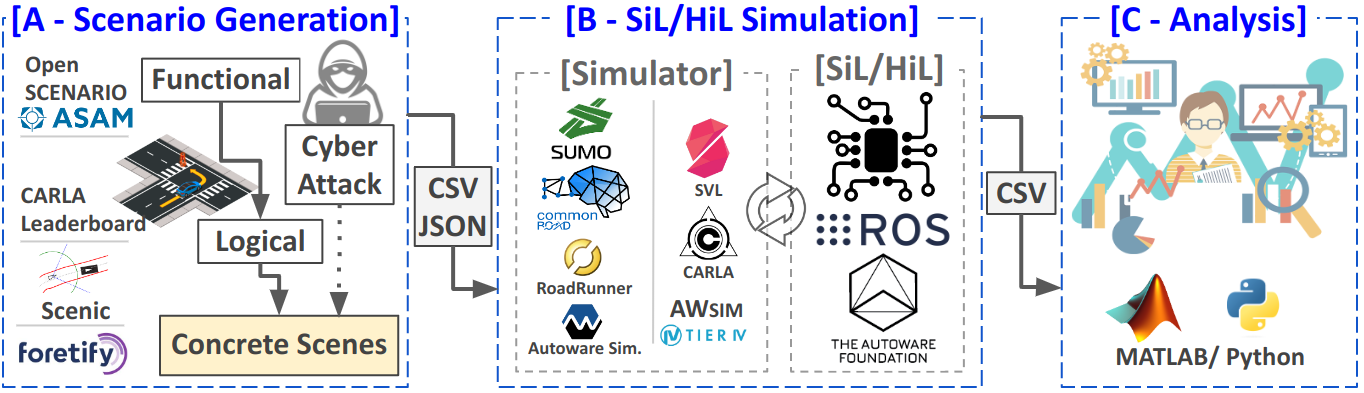
TalTech employs a three-stage validation toolkit: (A) scenario generation, (B) SiL/HiL simulation across low/high fidelity, and (C) results analysis. Digital twin feedback couples real-world data with virtual testbeds to accelerate coverage, improve reproducibility, and cut cost/time before public-road trials.
Selected Research Experiments
Advanced Overtaking
Urban overtaking was addressed via smooth two-phase sigmoid trajectories aligned with shuttle kinematics. High-fidelity simulation preceded vehicle trials to ensure safe, swift path generation and robust execution.
Language of Driving (LoD)
To improve human–AV interaction, the shuttle used LED symbols to communicate intent to pedestrians (e.g., “don’t cross” warnings, “safe to proceed” prompts). Studies evaluated comprehension and behavioral impact.
 LED signaling symbols for communicating with pedestrians.
LED signaling symbols for communicating with pedestrians.Combined Safety & Cybersecurity Testing
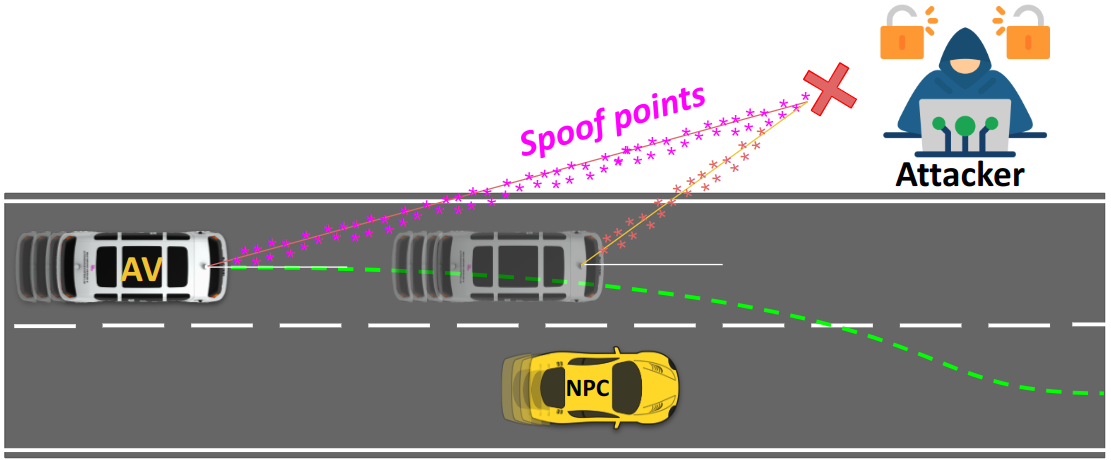
A joint methodology assessed cyberattack effects (e.g., LiDAR/position spoofing) on AV reliability versus safety baselines, using digital twins, SiL, and real-world tests — showing how attacks degrade otherwise-good algorithms.
MaaS XT — Integrating Last-Mile AVs
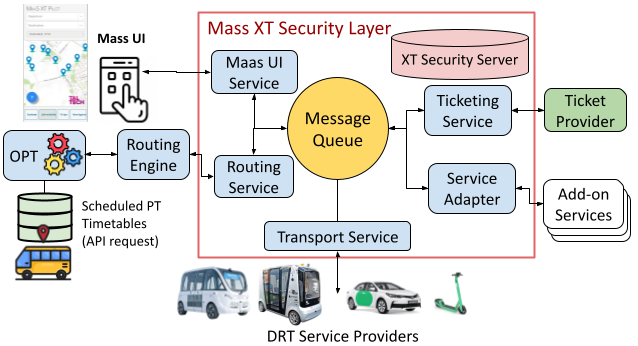
A multi-provider Mobility-as-a-Service platform (MaaS XT) was prototyped with secure X-Road-style data exchange, linking UI, routing, demand-responsive transport, and ticketing. Pilots included AV last-mile services.
Pilots & Living-Lab Operations
iseAuto has run campus and city pilots since 2019 (e.g., Tallinn business park service near the airport), as well as multi-city and EU projects. These deployments provided user acceptance insights, weather and operations data, security experiments, and MaaS integration.

| Year | Pilot / Project | Focus |
|---|---|---|
| 2018 | SOHJOA Baltic | Weather challenge, UX, regulatory roadmap |
| 2020 | FABULOS | Fleet functionality, interoperability, security |
| 2021 | SOHJOA Last Mile | On-board safety operator removal |
| 2022 | CitySCAPE | Cybersecurity experiments |
| 2023 | FinEst Future Mobility | MaaS integration, user acceptance |
| 2025 | XTRUST-6G | Zero-trust 6G security; iseAuto shuttle pilot (V2I, cyber scenarios) |
| 2025 | PLIADES | Data space integration, cyber testing |
Specs & Openness
- Sensors: 3D LiDARs, multi-camera, radar, GNSS/IMU.
- Software: Autoware.universe on ROS; TalTech ROS↔UDP control bridge; modular device drivers.
- Control: master + function controllers; safety controllers; multi-bus CAN + Ethernet; fail-operational design.
- Ops envelope: low-speed L4 (≈20 km/h) in campuses, business parks, and mixed urban test areas.
- Use: research, education, pilots; full access for partner labs under collaboration agreements.
Team & Collaboration
The programme is led by TalTech’s Robotics & Autonomous Vehicles group with industry partners. We welcome joint research, PhD projects, and pilot deployments leveraging the open iseAuto platform.